



永磁同步电动机具有在低速状态下实现大功率输出的特点,能够改变传统的“电动机→减速箱→曳引轮→负载(轿厢和对重)”曳引驱动模式,做到集曳引电动机、曳引轮、制动器、光电编码器于一体的驱动新模式,并具有节能、免维护、环保等优点。近几年来采用永磁同步无齿曳引驱动的VVVF拖动电梯,已占国内电梯市场分额的90%以上。
本文选自《电梯结构原理及安装维修 第5版》,属于初级入门类,广泛被用作培训教材。
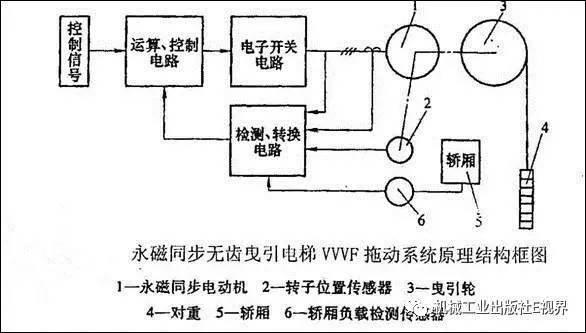
永磁同步无齿曳引电梯VVVF拖动系统的结构原理
采用永磁同步电动机作为曳引电动机的VVVF电梯拖动系统,主要由永磁同步电动机、运算控制电路、电子开关电路、检测转换电路构成。
1.永磁同步电动机
20世纪60年代稀土永磁材料的发现及其应用技术的进步,为永磁同步电动机制造技术的发展奠定了可靠的物质技术基础。近年来实际使用的钕铁硼稀土永磁材料集铝镍钴、铁氧体两种磁性材料的优点于一体,已是一种较理想的磁性材料。永磁同步电动机和普通电动机一样由转动和固定不动两部份构成。
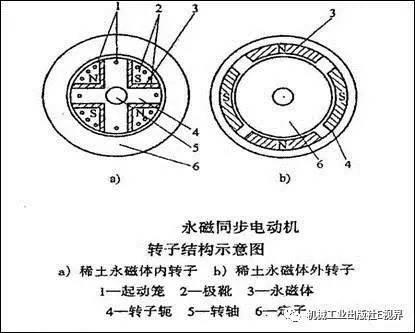
2.永磁同步电动机的转动部份(转子)
永磁同步电动机和普通交直流电动机一样由转动和固定不动两部份构成。转动部份相当于普通交直流电动机的转子或电枢,固定不动部份相当于定子绕组或激磁绕组及其外壳和机座。普通交直流电动机的转动部份均在固定不动部份之内,而永磁同步电动机的转动部份则有在固定不动部份之内和之外两种型式。而且这两种结构型式的永磁同步电动机在国内电梯产品里都占有一定的市场份额。
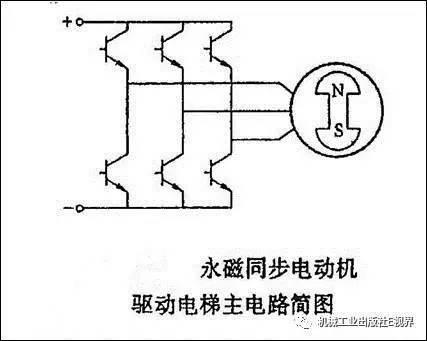
3.永磁同步电动机的固定不动部份(定子)
永磁同步电动机的固定不动部份指的是永磁同步电动机的定子绕组部份,永磁同步电动机的定子绕组为三相对称绕组,绕组采用Y型接法,三个绕组有三个引出线的接线端,以便与外部电源联接,与普通异步电动机基本相同。对于永磁同步无齿曳引机子驱动电梯的VVVF拖动系统,施加在永磁同步电动机定子绕组引出端子上的电源,是适应永磁同步无齿曳引驱动电梯VVVF拖动系统的逆变器输出的频率、电压幅值按电梯给定速度曲线变化的三相交流电源,驱动永磁同步电动机按预定速度曲线运行。
4.永磁同步无齿曳引驱动电梯VVVF拖动系统的信息采集
永磁同步无齿曳引机做到集曳引电动机、曳引轮、制动器、光电编码器于一体。采用这种驱动模式的拖动系统,需要准确采集以下相关信息。
(1)由于永磁同步曳引电动机的转动部份直接驱动曳引轮、由曳引轮槽里的曳引绳牵动轿厢和对重上下运行。因此要求轿厢的负载检测装置必须采用具有线性变化律的负载检测装置,预先将检测结果按信号传送方式传送给驱动控制微机,由驱动控制微机控制逆变器输出相应大小的电流电压值,避免制动器松闸瞬间由于不同负载造成起步过慢过猛,影响电梯起动运行时的舒适感。
(2)由于永磁同步电机永磁体产生的磁极方向随时都要确定,因此永磁同步无齿曳引电梯VVVF拖动系统需配置精确的转子位置检测装置和电流电压检测装置,对转子位置进行精确控制,对转子位置的精确控制是永磁同步无齿曳引电梯VVVF拖动系统的重要技术环节之一,它关系着电梯的安全可靠运行。永磁同步电动机常见的转子位置检测装置有光电编码器和旋转变压器两种。
1)光电编码器:光电编码器又有增量式和绝对式两种。增量式具有结构简单,使用方便等优点,但长期使用可能产生积累误差,而且突然停电会造成转子位置信号丢失等问题。绝对式光电编码器按二进制数设计,采用8~12个数码就能得到精确的位置信号,可直接得到转子的绝对位置等优点。
2)旋转变压器:采用旋转变压器作为转子位置检测装置是根据变压器的工作原理,分别在永磁同步电动机的定子和转子上装设二相交流绕组。在定子绕组U和V上分别通以互差90°的对称电压,当转子从基准位置转过θ角度时转子上的U和V两绕组中分别感应¡出比定子电压超前或落后θ角度的电压,再通过测量转子的感应电压与定子基准电压之间的相位差就可判定转子的位置。
永磁同步无齿曳引电梯VVVF拖动电梯的优点
1.永磁同步无齿曳引机的转子采用钕铁硼稀土永磁体取代鼠笼,转子里没有电流,电机的功耗只取决于定子绕组电流的大小,比普通VVVF电梯拖动系统节能25%。
2.调速范围可达1:1000,甚至更高,能在低频、低压、低速情况下提供足够大的转矩,得以改变“电动机→减速箱→曳引轮→负载(轿厢和对重)”的传统曳引驱动模式,使曳引机的体积和重量大大减小,甩掉了减速器,不需要加油和换油,维修方便又环保。
3.永磁同步无齿曳引机满载起动电流不超过额定电流的1.5倍,对同网用电户的影响降低至最低程度。
4.采用永磁同步无齿曳引VVVF拖动的电梯,若因制动器失效,造成电梯轿厢和对重装置处于自由状态时,在永磁同步电动机三相定子绕组构成电回路的情况下,可以确保电梯的溜车速度不大于0.4m/s,使电梯使用过程中的安全性能大大提高。




